Differenze tra le versioni di "Pagina principale"
m |
m |
||
| Riga 29: | Riga 29: | ||
* Movimento ed alimentazione elettrica per mezzo di un '''[[Motore_stock|motore classe FA-130]]''' e di '''[[Le_pile|2 pile stilo da 1.2/1.5v]]'''; | * Movimento ed alimentazione elettrica per mezzo di un '''[[Motore_stock|motore classe FA-130]]''' e di '''[[Le_pile|2 pile stilo da 1.2/1.5v]]'''; | ||
* Sebbene esistano dei meccanismi che permettano alle mini 4WD di sterzare in determinate occasioni, queste automobiline vanno sempre dritto; | * Sebbene esistano dei meccanismi che permettano alle mini 4WD di sterzare in determinate occasioni, queste automobiline vanno sempre dritto; | ||
| + | |||
| + | |||
| + | <div class="class="col-md-12" style="text-align: center;"> | ||
| + | <gallery widths=170px> | ||
| + | File:Dash-1_Emperor_Premium.jpg|La Emperor | ||
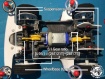
| + | File:Super-II.jpg|Il telaio Super-II | ||
| + | File:Dash-CB1_GeoEmperorPremium.jpg|La Geo Emperor | ||
| + | </gallery> | ||
| + | </div> | ||
</div> | </div> | ||
| Riga 41: | Riga 50: | ||
* L'utilizzo di una mazza detta "'''[[Costruzione_del_bastone_di_guida|bastone di guida]]'''": una lunga asta formata da una zona d'impugnatura ed una "paletta". Tale strumento è del tutto simile ad un bastone da Hockey, ma generalmente si presenta molto più leggero. Durante la sua marcia, la mini 4WD è "deviata" dal corridore attraverso l'utilizzo del bastone di guida, per fare ciò il pilota deve dunque correre dietro alla mini 4WD e controllarne i movimenti in tempo reale. | * L'utilizzo di una mazza detta "'''[[Costruzione_del_bastone_di_guida|bastone di guida]]'''": una lunga asta formata da una zona d'impugnatura ed una "paletta". Tale strumento è del tutto simile ad un bastone da Hockey, ma generalmente si presenta molto più leggero. Durante la sua marcia, la mini 4WD è "deviata" dal corridore attraverso l'utilizzo del bastone di guida, per fare ciò il pilota deve dunque correre dietro alla mini 4WD e controllarne i movimenti in tempo reale. | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
Entrambe le possibilità si poggiano sullo stesso principio: l'esecuzione di un percorso per "costrizione" attraverso deviazioni statiche (i muretti di una pista) o dinamiche (la paletta di un bastone di guida). | Entrambe le possibilità si poggiano sullo stesso principio: l'esecuzione di un percorso per "costrizione" attraverso deviazioni statiche (i muretti di una pista) o dinamiche (la paletta di un bastone di guida). | ||
Versione delle 18:29, 19 gen 2023
Cosa sono le mini 4WD?
Il termine "mini 4WD" si utilizza per identificare una categoria di automodello da corsa.
Sommario
| Storia |
| Generale |
| Tecnica
Guida · Pneumatici · Pile · Motori · Meccanica · Assetto · Telai · Fisica · Sospensioni · Materiali plastici · Stampa 3D |
| Tutorial |
| Gare |
| Contatti |
La prima mini 4WD della storia, la Stomper 4x4, fu creata da Adolph Goldfarb e prodotta dall'americana Schaper nel 1980. In seguito, nel 1982, la giapponese Tamiya commercializzò i suoi primi automodelli a quattro ruote motrici: nacque la prima serie di automodelli chiamata "Mini 4WD". Fu però con la terza serie di mini 4WD Tamiya, le Racing Mini 4WD (1986), che questi automodelli assunsero l'accezione di auto da corsa.
Le caratteristiche che fanno di un automodello una mini 4WD sono:
- Trazione integrale (4 ruote motrici);
- Scala 1/32;
- Movimento ed alimentazione elettrica per mezzo di un motore classe FA-130 e di 2 pile stilo da 1.2/1.5v;
- Sebbene esistano dei meccanismi che permettano alle mini 4WD di sterzare in determinate occasioni, queste automobiline vanno sempre dritto;

La Emperor

Il telaio Super-II

La Geo Emperor



E' possibile controllare la corsa di una mini 4WD in due modi:
- Utilizzando la mini 4WD all'interno di una pista appositamente prodotta. Una pista per mini 4WD è composta di un numero n di corsie (2, 3 o 5), ciascuna corsia è delimitata da "muretti" (detti anche "sponde" o "bordi") che permettono ad una mini 4WD l'esecuzione di un determinato percorso. Una mini 4WD è "costretta" fisicamente dal muretto (durante una curva ad esempio) a seguire l'andamento del muretto stesso;
- L'utilizzo di una mazza detta "bastone di guida": una lunga asta formata da una zona d'impugnatura ed una "paletta". Tale strumento è del tutto simile ad un bastone da Hockey, ma generalmente si presenta molto più leggero. Durante la sua marcia, la mini 4WD è "deviata" dal corridore attraverso l'utilizzo del bastone di guida, per fare ciò il pilota deve dunque correre dietro alla mini 4WD e controllarne i movimenti in tempo reale.
Entrambe le possibilità si poggiano sullo stesso principio: l'esecuzione di un percorso per "costrizione" attraverso deviazioni statiche (i muretti di una pista) o dinamiche (la paletta di un bastone di guida).
Questa wiki si occupa delle corse "Street Mini 4WD".
Cos'è lo Street Mini 4WD?
"Street Mini 4WD" (in giapponese " ストリートミニ四駆 ") è una categoria di gare in cui le Mini 4WD corrono principalmente fuori delle piste convenzionali, il più delle volte mediante l'impiego del bastone di guida.
Avviata in Italia nel 1994 e diffusa nel mondo dal 2016, la categoria Street Mini 4WD è adesso riconosciuta universalmente.
Uno dei concetti fondamentali che i piloti di Mini 4WD preparate per correre in strada perseguono è quello di essere in grado di sviluppare una macchina il più possibile simile a una vera auto da corsa.

La Proto Emperor ZX di Kidouin

MA della ZX di Kidouin
MA della SPS di ShInKurO

Shooting Proud Star di ShInKurO

Aero Solitude di Aran

Cross Tiger di Fox





